Autonomous Charging Car Emulation & Display
Application: Autonomous Charging of Electrical Vehicles
The grivix Autonomous Charging Car Emulation & Display is used to test the “Communication and Positioning” interface according to CAN-Bus J1939 (heavy duty vehicles, trucks, and busses) or CAN-Bus native for robots. It can be also used as an integration for existing vehicles in combination with the “Autonomous Charging Communication & Positioning Interface” to enable automatic charging from the driver (initiation of communication with the robot and opening and closing the flap).

Autonomous Charging Communication & Positioning Interface
Application: Autonomous Charging of Electrical Vehicles
The grivix Autonomous Charging Communication & Positioning Interface enables the in-range detection and communication between an autonomous or regular Electrical Vehicle and an autonomous Charging Station. It has LIN-Bus integrated to directly drive a motor to open and close a flap. The interface is available in a version for vehicles or infrastructure with specific enclosing.

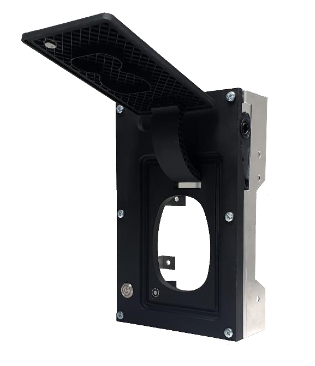
Autonomous Charging Inlet Flap
Application: Autonomous Charging of Electrical Vehicles
The grivix Autonomous Charging Inlet Flap opens and closes automatically at a charging spot. It is designed to be used with autonomous or semi-autonomous vehicles at automatic charging robots. But may also be used for higher convenience with conventional vehicles or to charge in areas which are dangerous for pedestrians. The grivix Autonomous Charging Flap consists of an enclosure protecting a CCS2, CCS1 or MCS inlet and a communication interface (“grivix Autonomous Charging Communication & Positioning Interface”) according to the most recent version of IEC TS 61851-26. The communication interface enables the in-range detection and communication between an autonomous or regular Electrical Vehicle and an autonomous Charging Station.